
В последнее время "из пол пера" нашей команды выходит много проектов с использованием платформы LEGO Mindstorms, а в рубрике "Строим из микроконтроллеров" свежих разработок у нас не наблюдается. Мы решили исправить эту несправедливость и задумали построить нового, "большого" робота. Небольших роботов, например "из коробки от тормозов" мы уже строили, но вот получится ли у нас собрать что-то побольше?
Проект нами планируется как "долгоиграющий", не нацеленный на быстрый результат любой ценой. Для начала начинаем потихоньку искать детали для нового робота и прикидывать что и как. Начнем мы с колесной платформы, добавим датчики и навигацию. В планах поставить на робота манипулятор и заставить ориентироваться в пространстве с использованием машинного зрения. Данный робот не предназначен для решения какой-то определенной задачи, это учебная модель.
Мы принципиально постараемся не использовать никаких не доступных в домашних условиях технологий, таких как сварка и не применять эксклюзивных деталей, поэтому наш робот будет полностью повторяем любым желающим.

Итак, что мы уже раздобыли из комплектующих и материалов:
1. Колеса пневматические для тележки RP1804, диаметром 250 мм, под ось 20 мм, 2 штуки. Имеют встроенные подшипники. Диски разборные, собраны с использованием болтов М8.
 2. Приводы стеклоподъемников от ВАЗ 2110, 2 штуки. Имеют встроенные редукторы 66:1. Питаются от 12 В. Судя по характеристикам и тестам в Интернете имеют ток холостого хода в 1,5А, в нагруженном состоянии - до 15-30А.
2. Приводы стеклоподъемников от ВАЗ 2110, 2 штуки. Имеют встроенные редукторы 66:1. Питаются от 12 В. Судя по характеристикам и тестам в Интернете имеют ток холостого хода в 1,5А, в нагруженном состоянии - до 15-30А.

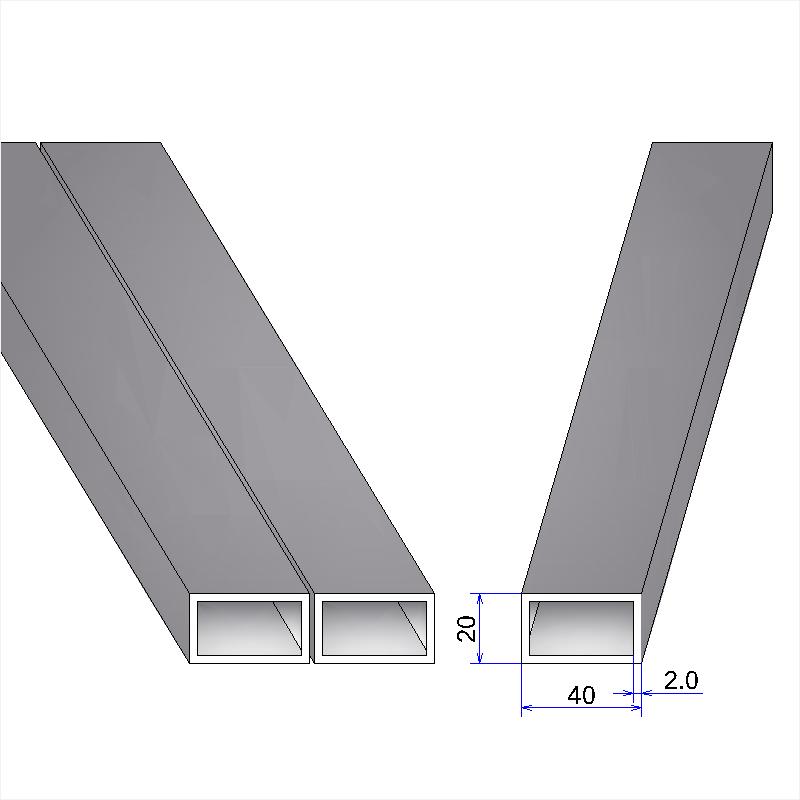
3. Труба квадратная стальная 40x20x2 мм. Планируем использовать для колесного узла, для крепления моторов. Болты и гайки М6 - для крепления моторов к колесным узлам.
 4. Труба стальная круглая 20x1,5 - для осей колес. Труба стальная 3/4 - для шайб на осях колес. Труба стальная 12x2 - для осей, передающих вращение от моторов колесам.
4. Труба стальная круглая 20x1,5 - для осей колес. Труба стальная 3/4 - для шайб на осях колес. Труба стальная 12x2 - для осей, передающих вращение от моторов колесам.
 5. Arduino Mega 2560. Решили использовать в качестве управляющего контроллера для двигателей и сбора показаний с датчиков.
5. Arduino Mega 2560. Решили использовать в качестве управляющего контроллера для двигателей и сбора показаний с датчиков.

Что еще может понадобится, что не раздобыли, но уже присматриваем:
Для питания планируем использовать аккумулятор от ИБП 12В 9Ач



Проект нами планируется как "долгоиграющий", не нацеленный на быстрый результат любой ценой. Для начала начинаем потихоньку искать детали для нового робота и прикидывать что и как. Начнем мы с колесной платформы, добавим датчики и навигацию. В планах поставить на робота манипулятор и заставить ориентироваться в пространстве с использованием машинного зрения. Данный робот не предназначен для решения какой-то определенной задачи, это учебная модель.
Мы принципиально постараемся не использовать никаких не доступных в домашних условиях технологий, таких как сварка и не применять эксклюзивных деталей, поэтому наш робот будет полностью повторяем любым желающим.

Итак, что мы уже раздобыли из комплектующих и материалов:
1. Колеса пневматические для тележки RP1804, диаметром 250 мм, под ось 20 мм, 2 штуки. Имеют встроенные подшипники. Диски разборные, собраны с использованием болтов М8.

3. Труба квадратная стальная 40x20x2 мм. Планируем использовать для колесного узла, для крепления моторов. Болты и гайки М6 - для крепления моторов к колесным узлам.
Что еще может понадобится, что не раздобыли, но уже присматриваем:
Для питания планируем использовать аккумулятор от ИБП 12В 9Ач
В качестве "мозга" робота, для анализа видеопотока с камеры - Raspberry Pi Zero
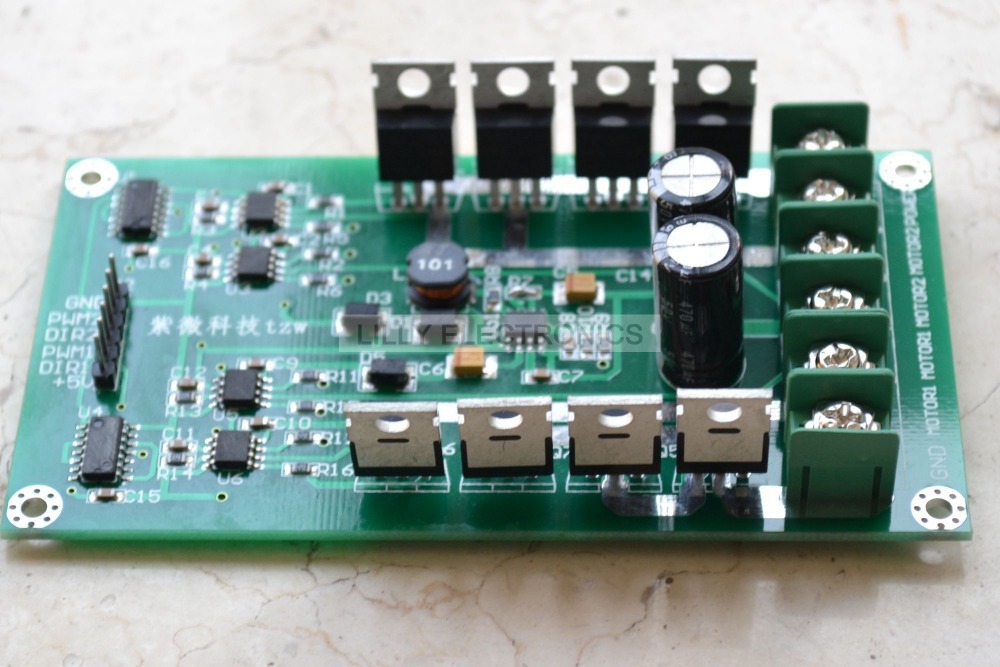
Для управления двигателями - китайский драйвер на 30А
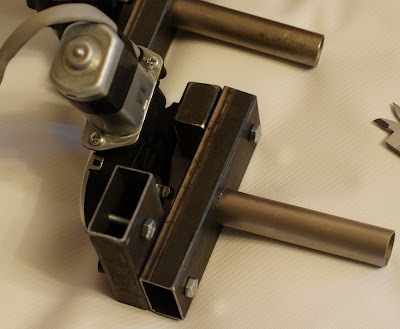
В данный момент начаты работы над колесными узлами, сейчас они выглядят вот так

Схема колесного узла:

Дальше в планах рама и корпус - в ожидании электроники от Почты России.










Челябинский LEGO на столько суровый....
ОтветитьУдалитьКлево.
ОтветитьУдалить